مقالة علمية للتدريسية ( م.م لبنى علي ) بعنوان " نظام تحكّم هجين للطائرات دون طيار باستخدام الشبكات العصبية "
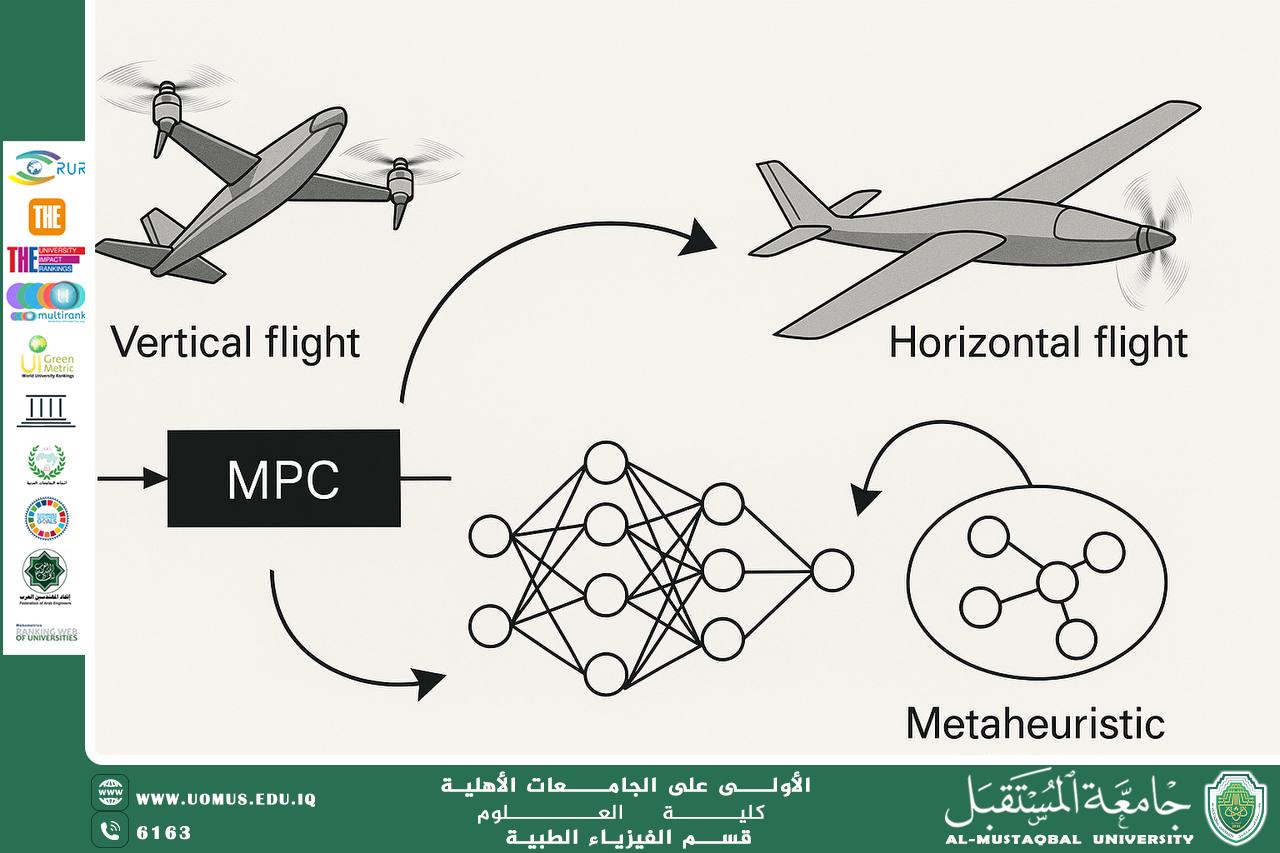
منذ سنوات، أصبحت الطائرات دون طيار من فئة VTOL الهجينة (قابلة للإقلاع والهبوط عمودياً) محور بحث متزايد في مجال التحكم الذكي. التحدي الأهم هو ضمان استقرار الطيران عند الانتقال بين أوضاع الطيران (من عمودي إلى أفقي والعكس)، وهو ما لا تستطيع أنظمة تحكم تقليدية مثل MRAC أو MPC التعامل معه بكفاءة كافية عند الانطلاق من نموذج بشري محدود النموذج.<br /><br />في دراسة نُشرت أخيراً في Neural Computing & Applications (يناير 2024)، قدم الباحثون Y. Sh. Alqudsi، R. A. A. Saleh وآخرون نظام تحكّم هجين قوي، يجمع بين التحكم الكلاسيكي–التنبؤي وتحسين خاصية الشبكات العصبية، واستخدم خوارزميات ميتاهيوريستيك لتحسين أداء المعاملات داخله .<br /><br />النظام يتكون من ثلاثة مكونات رئيسية:<br /> 1. نظام MPC تقليدي، وهو من أقوى نظم التحكم الحالاتية المتنبّئة، لكنه ثقيل حسابياً، ويعمل عادة على حاسوب صغير بسرعة 20 Hz فقط.<br /> 2. شبكة عصبية اصطناعية ANN تم تدريبها بطريقة “التعلّم المقلّد” (Imitative Learning)، لتقليد خرائط الإدخال-الإخراج الناتجة عن MPC.<br /> 3. خوارزمية تحسين ميتاهيوريستيك (مثل PSO أو Genetic)، لضبط معاملات الشبكة العصبية والمعاملات المبدئية لنظام MPC، مما يقلل من الأخطاء ويحسّن أداء التعقب والتوازن.<br /><br />⸻<br /><br />كفاءة النظام: بين الدقّة والسرعة<br /><br />في هذه الدراسة، استخدم الباحثون نموذج طائرة رباعية القوّة (quadrotor) بقدرة على التحوّل بين الوضعين. في وضع MPC التقليدي، يتم حل مسألة تحسين في كل دورة تحكم، وهذا يتطلب موارد كبيرة، ويعمل بمحرك حاسوب ذاتي بسرعة منخفضة.<br /><br />أما الشبكة العصبية (الطالب) فتتقن تقليد نتائج MPC (المعلّم) بدقة عالية، لكن بدون التكلفة الحسابية العالية. النتيجة؟ تحكّم سريع يقوم بتعديل الأوضاع بالطائرة لمدة تصل إلى 200 Hz، مع الحفاظ على دقّة تقارب تقارب نظام MPC الأصلي، ولكن بأداء أعلى، واستهلاك أقل للطاقة .<br /><br />⸻<br />نتائج المحاكاة والتجارب الواقعية<br /><br />أُجريت الاختبارات على النموذجين:<br /> • المحاكاة: أظهرت الشبكة العصبية تحسيناً كبيراً في تتبع المسارات المعقدة بقليل من الانحراف، مقارنة ببيئة MPC الأصلية، لكن أثناء الطيران.<br /> • الاختبارات في الواقع: تم اختبار النظام على طائرة هجينة حقيقية تُقلّب بين وضعي الهبوط والإقلاع والطيران العادي. الشبكة أثبتت قدرتها على الحفاظ على استقرار دقيق في كل الأوضاع، رغم التغيرات الطفيفة في الوزن والظروف الجوية .<br /><br />⸻<br /><br />تحليل معمق للمنهجية<br /> • التحكم التقليدي (MPC): رغم قوّته في التعامل مع القيود والاستجابة المتنبّئة، يظل عبئه الحسابي عائقاً.<br /> • التعلّم المقلّد: يسمح للشبكة بتعلم خرائط التحكم في الزمن الحقيقي، بدون إعادة برمجة أو تركيب موديلات متعدّدة.<br /> • تحسين المعاملات: باستخدام خوارزميات مثل PSO، تم إيجاد معاملات مثالية للشبكة، مما يقلل من الخطأ ويزيد من سرعة الاستجابة.<br /> • التجريب الواقعي: يشكل الدليل الأهم على جدوى النظام، حيث أظهرت نتائج ملموسة في ظروف بحرية، مقاومة للرياح، تغيير الوزن، والتوازن المستمر.<br /><br />⸻<br /><br />💡خلاصة وتطلعات مستقبلية<br /><br />هذا البحث يشكّل نقطة تحول في تصميم أنظمة تحكّم هجينة للطائرات بدون طيار: يجمع بين المرونة والاعتمادية، مزايا MPC والدقة الحسابية العالية لـ ANN، ويضمن أداءً عالي الكفاءة والسرعة.<br /><br />من هنا، يمكنك تطوير خط بحثك عبر:<br /> • توسيع هذا التصميم ليضمّ شددات أخرى مثل ANN النبضية (SNN) أو CovNNs للتعامل مع الرؤية وأجهزة الاستشعار.<br /> • تصميم نماذج HIL أو تجارب ميدانية أكبر تضم سرباً من الطائرات.<br /> • إعداد ورقة بحث قابلة للنشر في مجلات SCOPUS/ISI باستخدام النتائج التجريبية الواقعية<br /><br /><br /><br /><br />جامعة المستقبل الجامعه الاولى في العراق .<br/><br/><a href=https://uomus.edu.iq/Default.aspx target=_blank>موقع جامعة المستقبل</a>