A scientific article by the lecturer (Assistant Lecturer Lubna Ali) entitled “A hybrid control system for drones using neural networks”
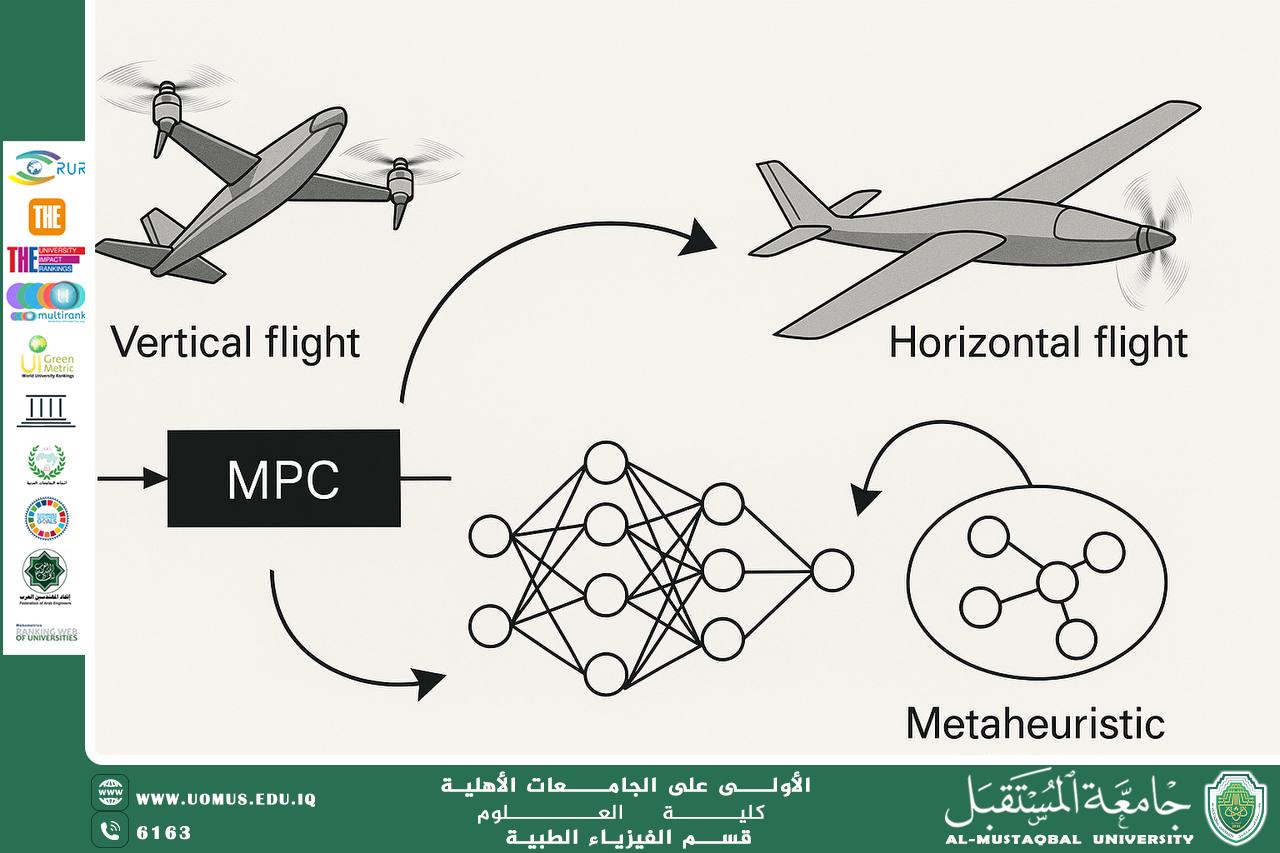
In recent years, hybrid VTOL (Vertical Take-Off and Landing) drones have become a growing focus in the field of intelligent control. The primary challenge lies in ensuring flight stability during mode transitions (from vertical to horizontal flight and vice versa)—a task that traditional control systems like MRAC or MPC struggle to handle efficiently when based on limited human-designed models.<br /><br />In a recent study published in Neural Computing & Applications (January 2024), researchers Y. Sh. Alqudsi, R. A. A. Saleh, and colleagues proposed a robust hybrid control system. This system integrates classical model predictive control (MPC) with neural network enhancement and employs metaheuristic algorithms to optimize its internal parameters.<br /><br />The system consists of three main components:<br /> 1. A conventional MPC module, known for its powerful predictive capabilities, but computationally intensive. It typically operates at only 20 Hz on a small onboard computer.<br /> 2. An artificial neural network (ANN), trained using imitative learning to replicate the input-output behavior of the MPC controller.<br /> 3. A metaheuristic optimization algorithm (e.g., Particle Swarm Optimization or Genetic Algorithms) used to fine-tune both the neural network parameters and the initial settings of the MPC controller, thereby reducing error and enhancing trajectory tracking and stability.<br /><br />⸻<br /><br />System Efficiency: Balancing Accuracy and Speed<br /><br />In the study, the researchers used a quadrotor drone model capable of transitioning between flight modes. In the standard MPC configuration, an optimization problem is solved at each control cycle, which consumes significant resources and limits the system to a slower 20 Hz update rate.<br /><br />However, the ANN (acting as the “student”) successfully mimics the MPC outputs (the “teacher”) with high accuracy but at a much lower computational cost. The result? A control loop operating at up to 200 Hz, offering rapid adjustments to flight modes while maintaining precision nearly equivalent to the original MPC system—with less energy consumption and higher responsiveness.<br /><br />⸻<br /><br />Simulation and Real-World Testing<br /><br />The system was tested in two environments:<br /> • Simulation: The ANN demonstrated significant improvements in following complex trajectories, with minimal deviation from the paths computed by the original MPC.<br /> • Real-world experiments: The system was tested on a real hybrid drone that transitions between hover, take-off, and cruise flight modes. The ANN showed strong stability control under various conditions, including minor weight changes and variable wind patterns.<br /><br />⸻<br /><br />In-depth Analysis of the Methodology<br /> • MPC: While powerful in handling constraints and offering predictive responses, its computational load remains a major limitation.<br /> • Imitative Learning: Enables the ANN to learn real-time control mappings without the need to reprogram or redesign models.<br /> • Parameter Optimization: Using algorithms like PSO, ideal values were found to minimize error and enhance responsiveness.<br /> • Experimental Validation: Real-world results in maritime and windy conditions confirmed the system’s practicality and robustness.<br /><br />⸻<br /><br />Conclusion and Future Directions<br /><br />This study marks a turning point in the design of hybrid control systems for UAVs. It successfully merges the reliability of MPC with the computational efficiency of neural networks, achieving fast and accurate control performance.<br /><br />You can build upon this research by:<br /> • Expanding the architecture to include spiking neural networks (SNNs) or convolutional neural networks (CovNNs) for sensor and vision processing.<br /> • Designing larger-scale HIL (Hardware-in-the-Loop) or field experiments involving UAV swarms.<br /> • Preparing a publishable paper for SCOPUS/ISI-indexed journals using the real-world experimental results.<br /><br /><br /><br /><br />"AL_mustaqbal University is the first university in Iraq"<br/><br/><a href=https://uomus.edu.iq/Default.aspx target=_blank>al-mustaqbal University Website</a>